*ここで使っている基板は間違って買ったものです。下に改めて買った基板のリンクがあるので、購入の際はリンクに飛んでください。
目次
経緯
前回はモータの制御をやろうとしたら、配線を繋げるとラズパイの電源が落ちるというトラブルに見舞われたので、今回はそれを修正したいと思います。
部品
- ピンソケット2種類
- 基板
- Raspberry Pi Zero
- モータドライバー
- ジャンプワイヤー
- モータ
- 電解コンデンサ
- 10kΩ抵抗
使った工具など
- ハンダ一式
- スパナ
- テスター
やったこと
まずは導通チェック
テスターを用いて、導通はあるか、くっついてないかなど、調べましたが、
特に変なところはなし。
ハンダ具合
再度、きちんとハンダされているかを確認しました。
みると所々、基板に溶け込んでいないところがあったのでそれを修正しました。
が、トラブルは改善されませんでした。
接続の確認
VCC、VS、Vrefの確認。
VrefとVSには10kΩを介して、ラズパイ5Vに繋ぐ。
じゃあVCCってどこに繋ぐの?
わからない(T . T)
てか、繋がなきゃいけないの?
もう無理(T . T)
ということで諦めました。
と色々、調べんたんですけど、私の知識不足ですが、トラブルは直らず。
私はモータとラズパイの電源を共有して使いたいと思っていて、色々サイトを物色した結果、
ラズパイとモータは別電源で取っている人がほとんどで、私みたいな人が全然いないくて、Give upです。
私もモータはモータで電源を作り、また、ラズパイはラズパイで電源を設けようとと思います。
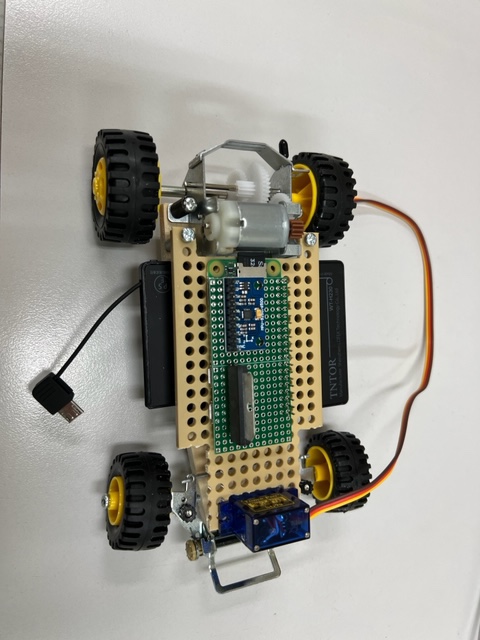
車のレイアウトからやり直しですね。
あ〜あ。
私は電子工作ではなく、
プログラミングをやりたいんだーーーー!