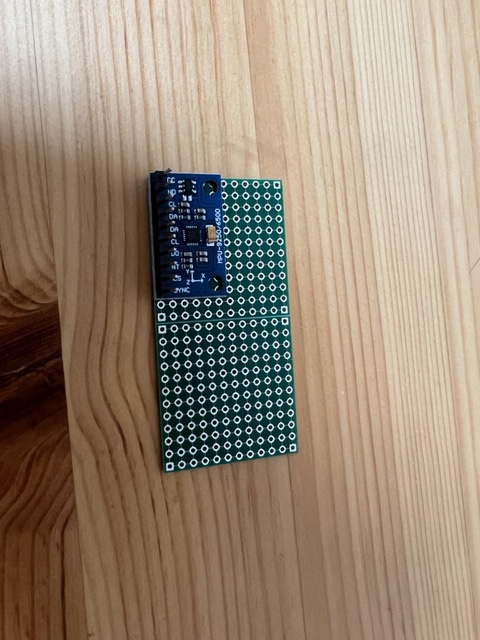
*ここで使っている基板は間違って買ったものです。下に改めて買った基板のリンクがあるので、購入の際はリンクに飛んでください。
目次
経緯
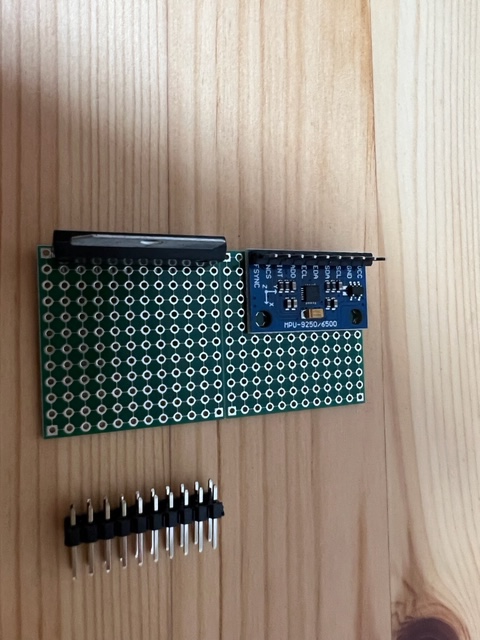
前回、レイアウトを大体決めたので、今回はハンダつけをします。
部品
- ピンソケット2種類
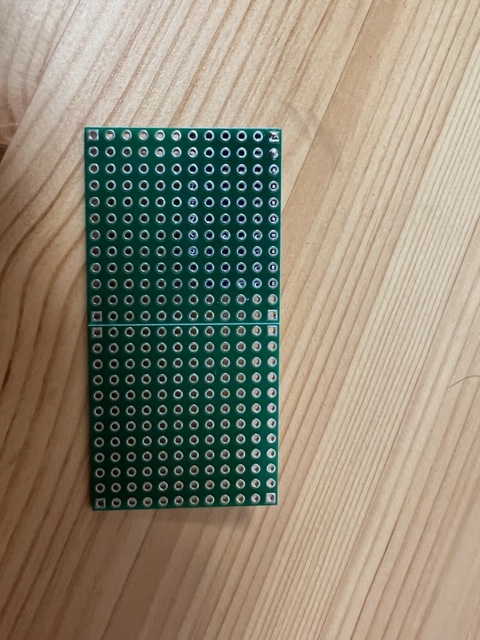
- 基板
- Raspberry Pi Zero
- モータドライバー
- ジャイロセンサー
- ジャンプワイヤー
- モータ
- コンデンサ
- 10kΩ抵抗
*私はジャンプワイヤーを使用しますが、配線ならどれでもいいと思います。
使った工具など
- ハンダ一式
- スパナ
早速、ハンダつけ
モータとコンデンサーとジャンプワイヤー
まず、モータにコンデンサーをハンダします。
コンデンサーはノイズを軽減してくれるらしく、回転が安定するらしい。

次にモータとジャンプワイヤーをハンダします。


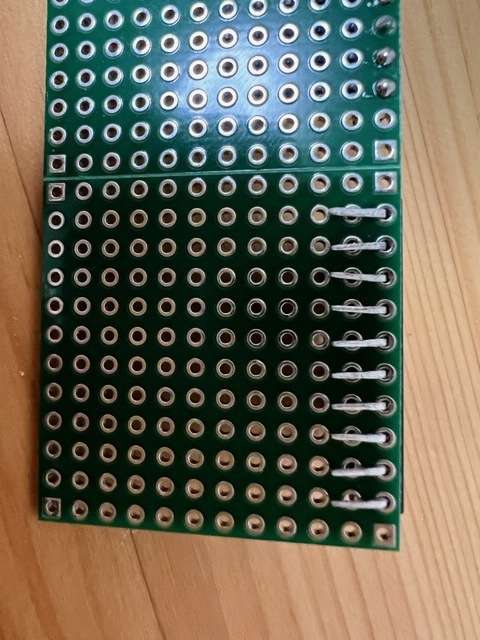
ラズパイとピンソケットをハンダする
次にラズパイとピンソケットをハンダします。




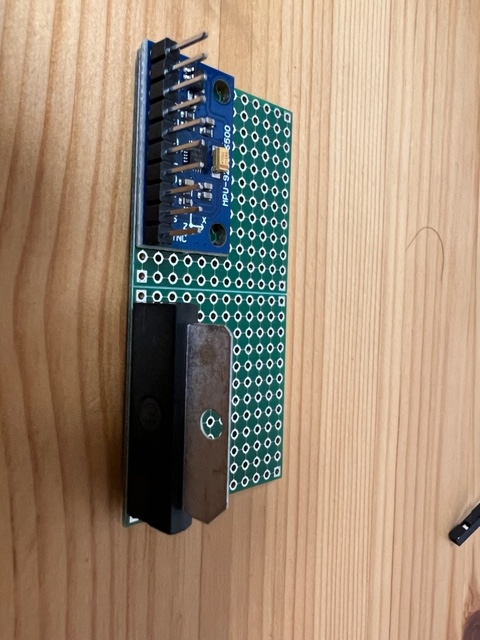
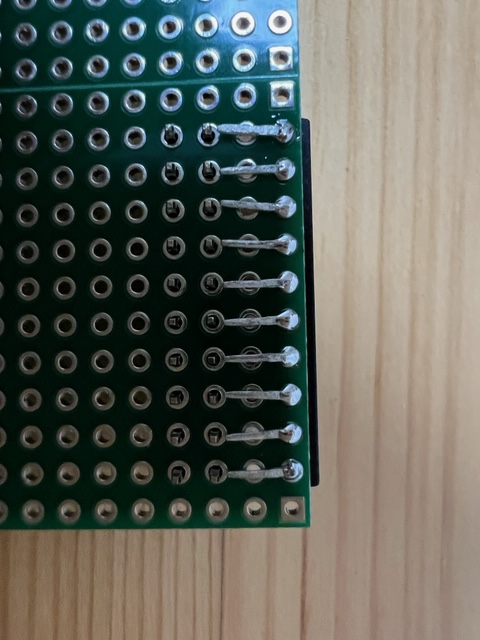
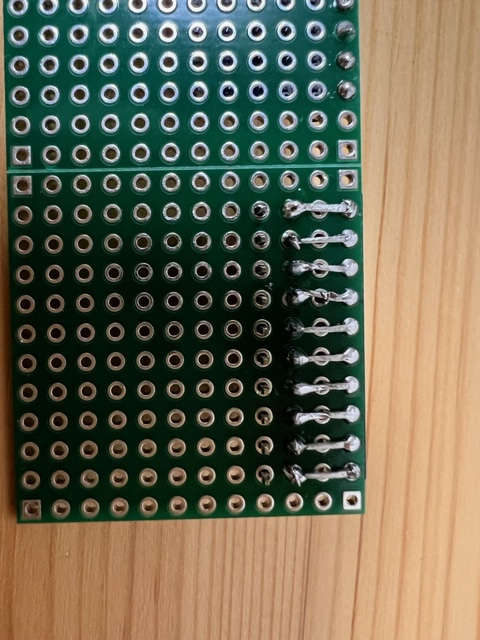
ジャイロセンサと基板をハンダ
次に2層側の基板をハンダします。
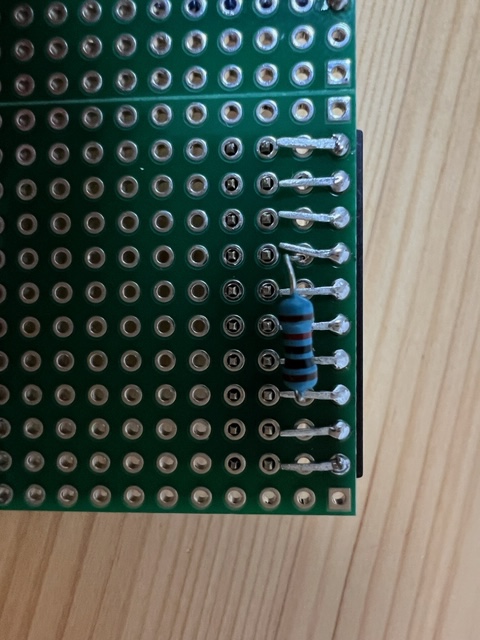
モータドライバーのハンダ
最後にモータドライバのハンダです。
モータドライバ(4番と8番)10kΩの抵抗を噛ませる


今回はこれで終わり。
まだ、サーボモータとか残っていますが、今回はここまでで。
次はプログラムでモータを動かしていきたいと思っています。
ここまでブログを読んで頂きありがとうございました。
使った部品
抵抗もコンデンサも1個で十分なのですが、1個で売ってるネットショップでは結局送料もかかるので、大量に買いました。