目次
環境
バギー工作基本セット(タミヤ)
ユニバーサルプレート(タミヤ)
ユニバーサルアームセット(タミヤ)
モバイルバッテリ(TNTOR)
使った工具など
ヤスリ
ドリル
瞬間接着剤
経緯
Raspberryp Piの設定や回路は嫌になってきたので、気分転換に車体をの方を進めてみた。
やったこと
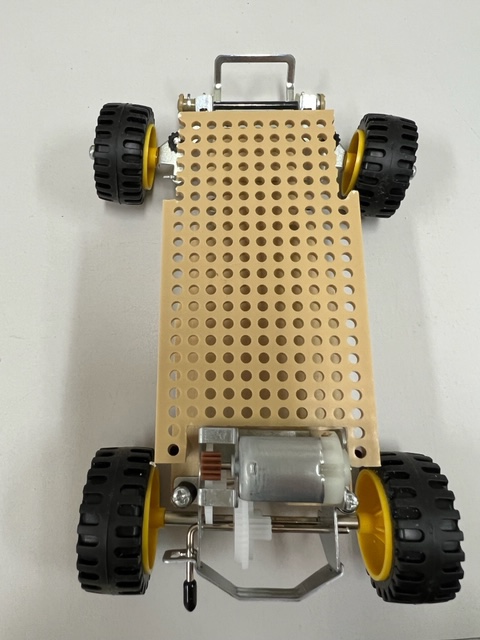
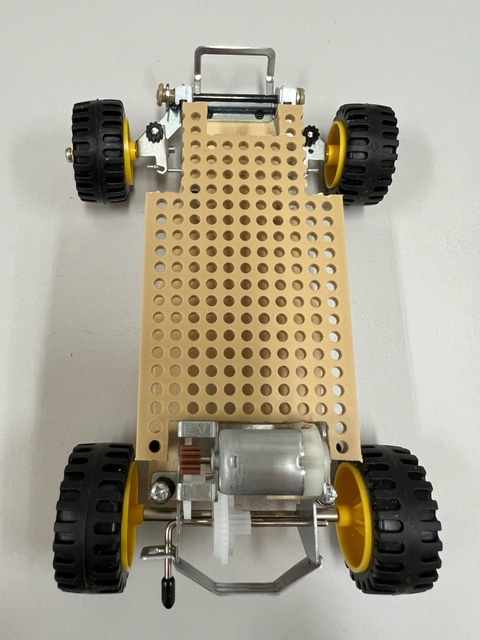
ユニバーサルプレートの整える
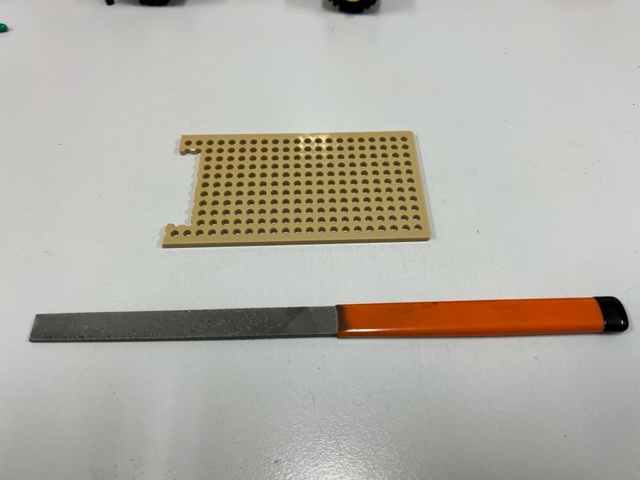
前に加工した2階部分をヤスリで整えました。
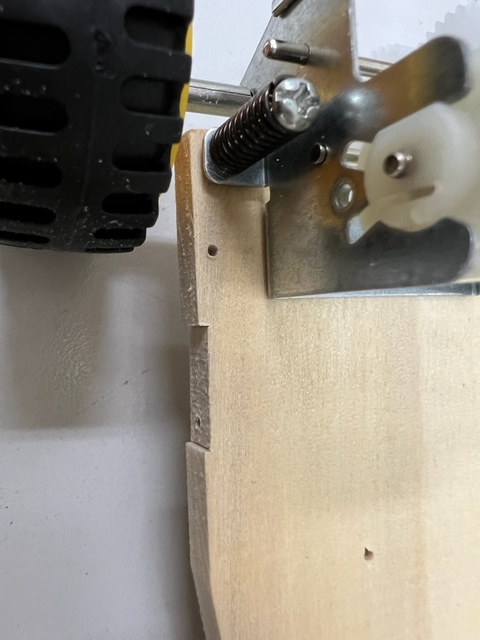
シャシの土台にアンカーをうって、筒をつける

シャシの土台を加工しました。筒が来る場所にアンカーを打つための印をつけます。(わかりにくいですが、モーターが取り付けられているビスのあたりに薄い黒点が印です。)


2階部分を再加工
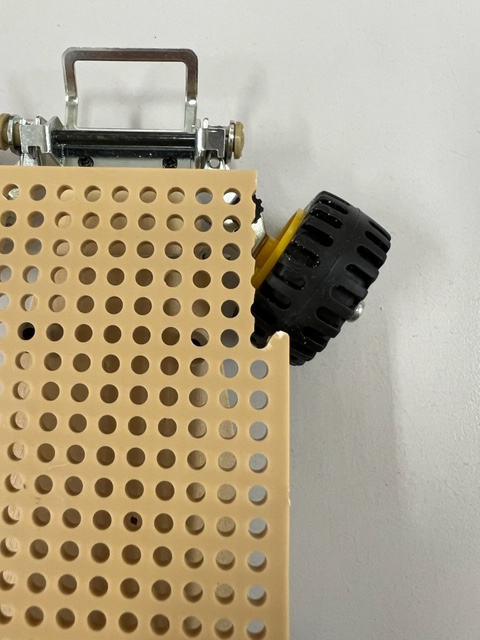
サーボモータ取り付け箇所加工
次にサーボモータのところを加工します。
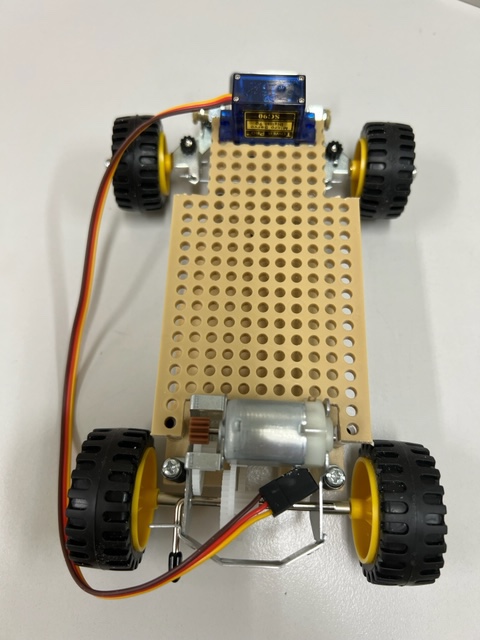
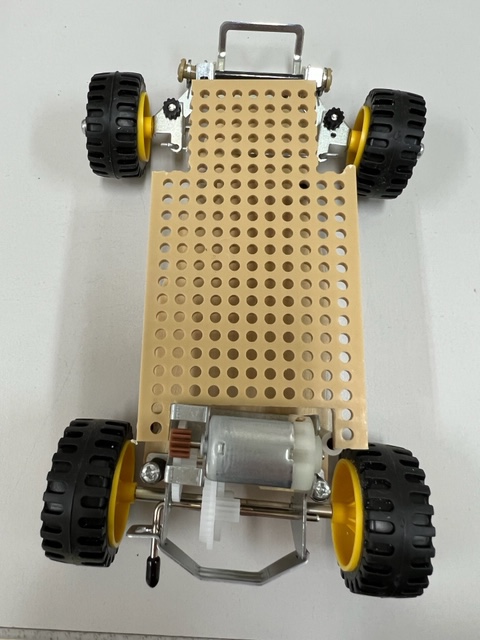
ほぼほぼ2階部分は完成!
これで2階部分でやること、カメラを取り付けるだけとなりました。
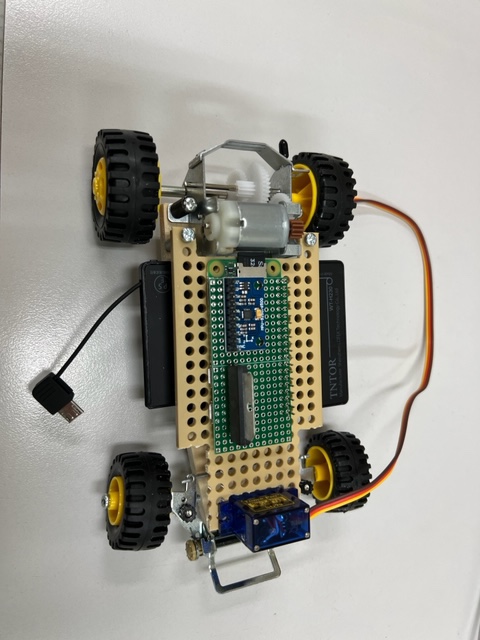
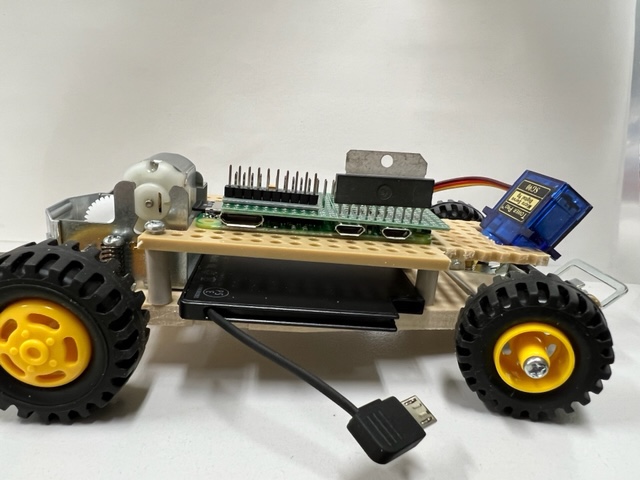
基盤とサーボモータの間にカメラを設置するつもりです。
ここまで読んで頂きありがとうございました。
使った部品
今回使用した部品です。