目次
概要
ロボットに興味がわいたので、アマゾンでフォロを購入して作ってみました。

以下は動画です。
工作

こんな部品たちです。
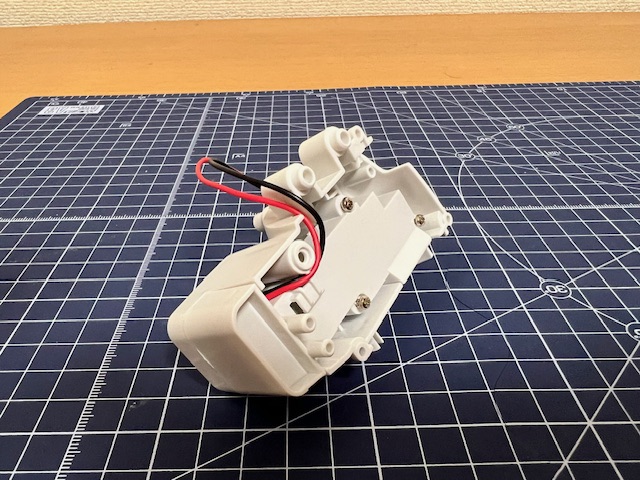
ギアボックスが完成しました。
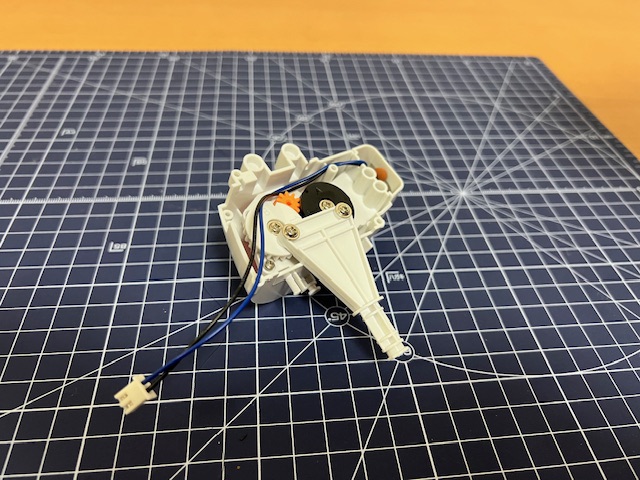
もう一つのギアボックスです。
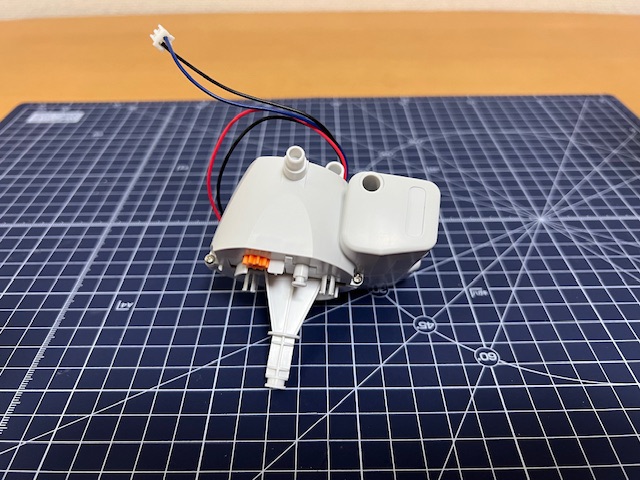
ドッキングしました。
足を作っています。
体と足が完成しました。

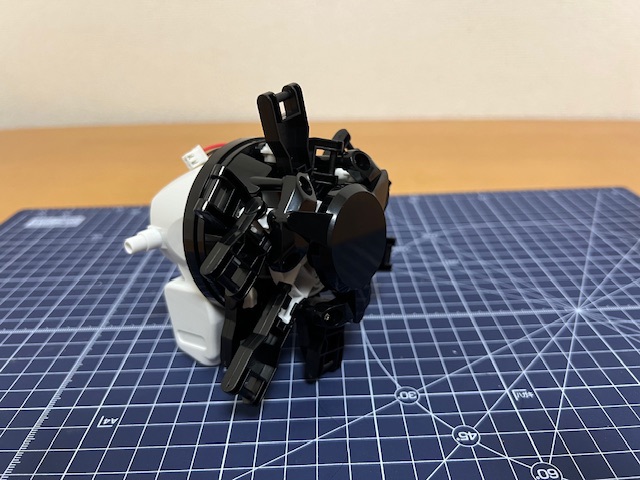
頭です。

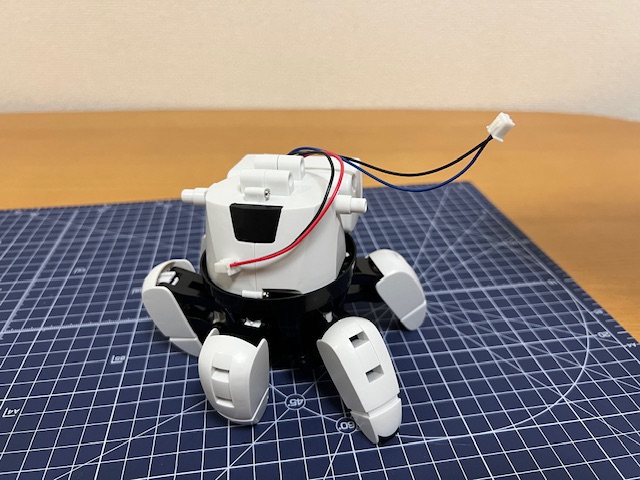
完成。だいたい2時間くらいでした。
スイッチONしても動かない(´;ω;`)ウゥゥ
トラブルシューティング
バッテリ
そこらに転がっていた電池を使ったから、電池が無くなっていると思い、新品と交換。
→電源ONした。
今度は異音がする。
ビスの締り具合
ギアが原因だと思い、ギアボックスを見たら、なんかビスの取り付けが甘い気がして、ビスを増し締めした。
→変わらずうるさい。
バリ取り
足の部分にギアボックスの回転を受け取る部分があるけど、ギアボックスからの回転をうまく受け取れてない気がして、いろいろ見てたら、でかいバリを発見。
→それを除去するしたら、うまく回転が伝わり、動いた。
スイッチ
再度、組み立てて、スイッチON
→動かない。
どうやら、完成系だと、スイッチのスライドがうまくいってない模様でスイッチの部分は裸にして、電源をON、OFFすることにした。
まとめ
ということで、トラブルの原因は、バリ取りとビスの締め具合とスイッチのON判定ということでした。
次回はプログラムをいじっていこうと思います。