目次
経緯
前々回、全部導通している基板を買ってしまったことに気づき。
今回は、改めて買った基板が届いたので、また、ハンダ付からリベンジします。
モータドライバをつけるとこまでやります。
部品
- ピンソケット2種類
- 基板
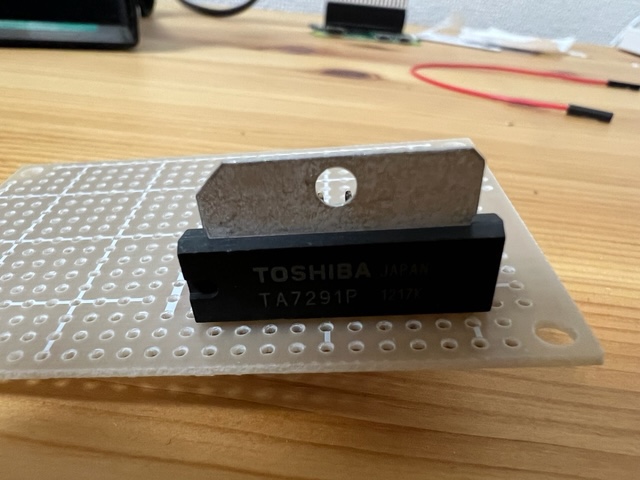
- モータドライバ
- Raspberry Pi Zero
- ジャンプワイヤー
使った工具など
- ハンダ一式
- スパナ
やったこと
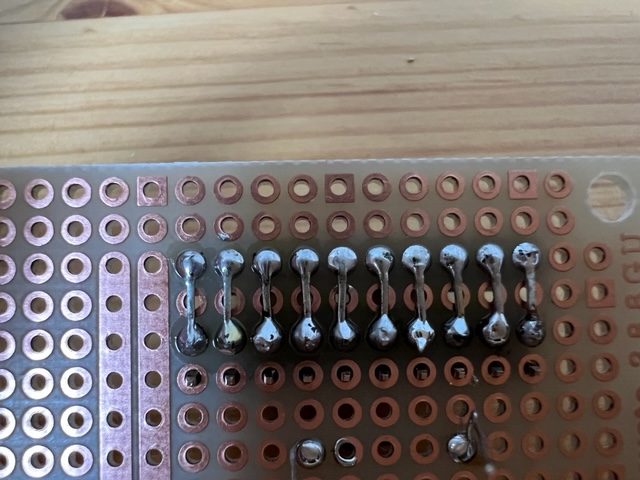
基板を確認


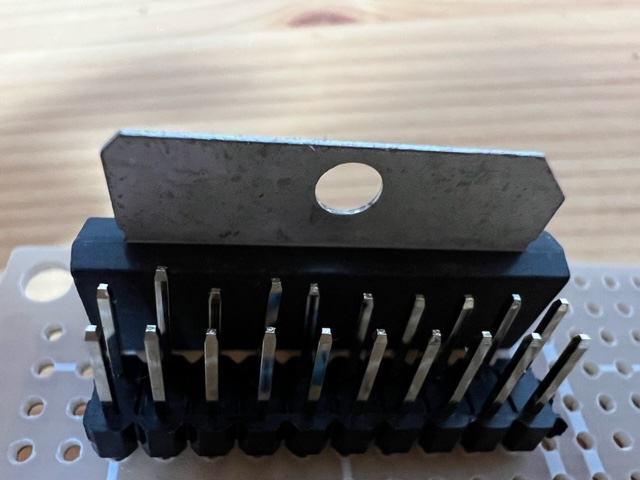
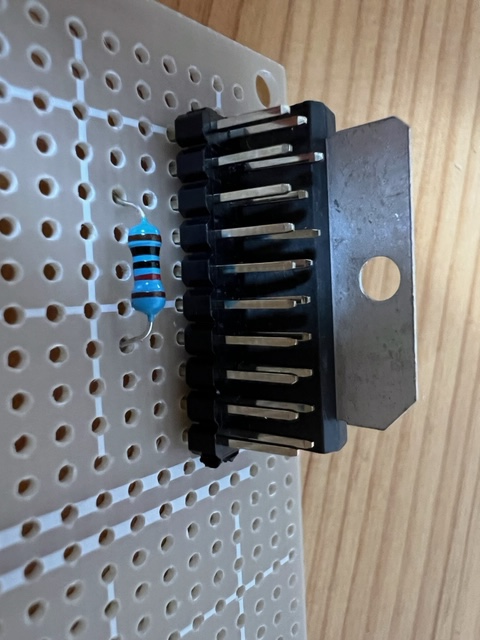
モータドライバをつける


いざ、ラズパイとつなぐ
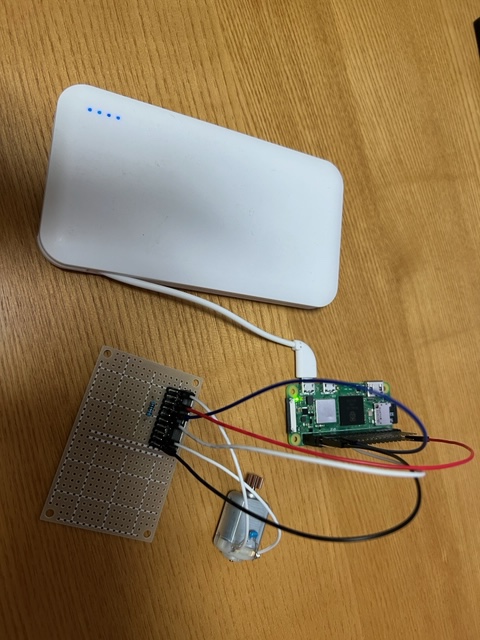
分かりづらいですが、ラズパイが緑色に光っているのが分かります。
前回はGNDに繋ぐと緑色のランプが消えていたので、今回はとりあえずは成功です。
これでモータの回路は完成です。たぶん。。。
次回はプログラミングでモータを動かしてみたいと思います。