目次
経緯
前回で駆動するモータのことは諦めて、今回は気分を変えて、サーボモータについてやります。
部品
- ピンソケット2種類
- 基板
- Raspberry Pi Zero
- ジャンプワイヤー
- サーボモータ
使った工具など
- ハンダ一式
- スパナ
- テスター
やったこと
ピンソケットを割る
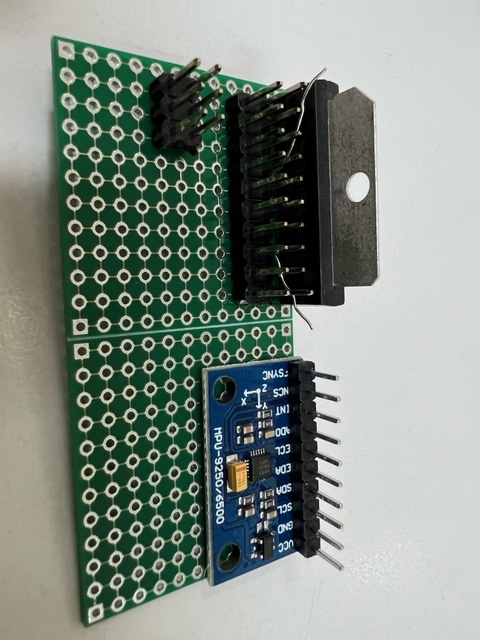
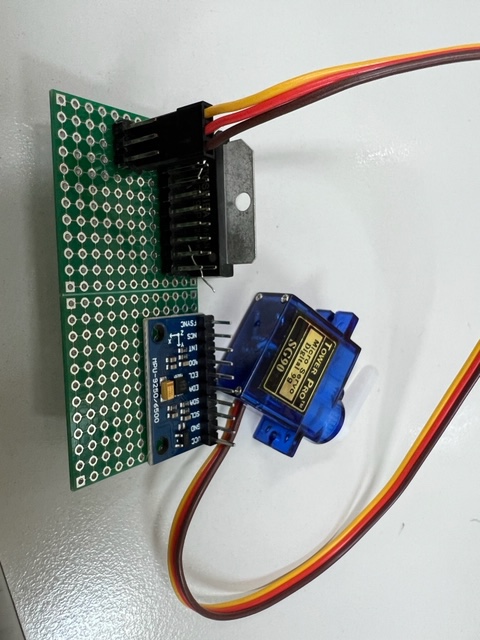
まず、サーボーモータもジャンプワイヤーを使って繋げたかったので、ピンソケットを割りました。

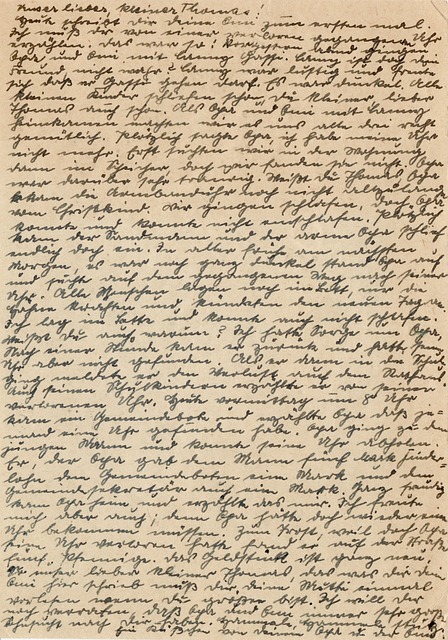
基板と合わせてみる
ハンダします

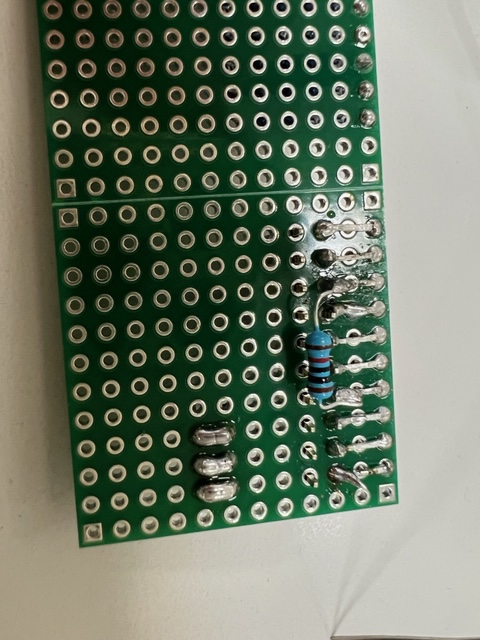
これでジャンプワイヤーをさせるようになりました。
導通チェック!!?
ちゃんとハンダできるか導通チェックします・・・
なんか、6本どれにテスターを当てても「ピーピー」言ってるんだけど。*ピー音は導通してる音です。
なんで?
てか基板どこに当てても「ピーピー」言ってるし・・・
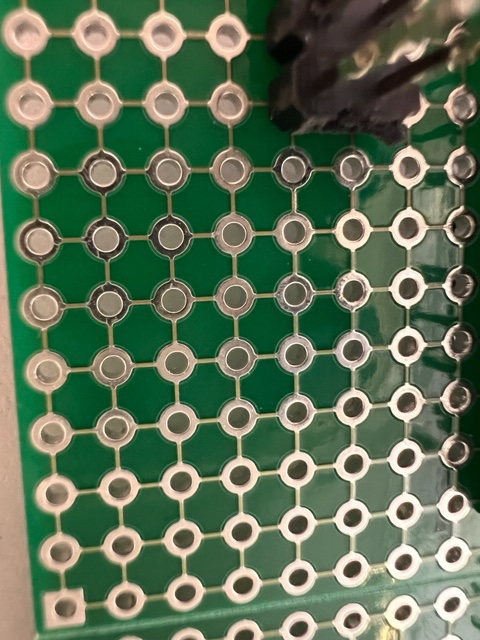
基板ってこんなだったっけ?
全部導通してるっけ?
大きさ、色以外に種類とかあるの・・?
基板買うの間違えた・・・?
だから、駆動モータの時も上手く行かなかったのかな?
よし、基板を買おう。