目次
経緯
前回のハンダはモータドライバまでだったので、
今回はサーボモータをハンダします。
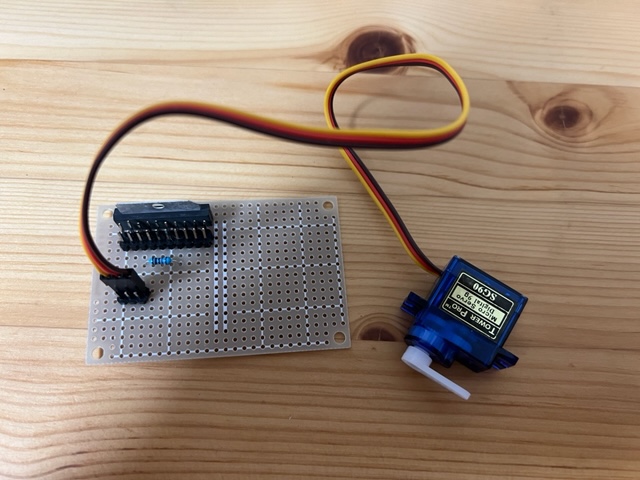
部品
- ピンソケット
- 基板
- サーボモータ
- 1kΩ抵抗
使った工具など
- ハンダ一式
- スパナ
やったこと
ピンソケットを割る

サーボモータは3つピンを使うので、3つでいいかと思います。

ハンダする
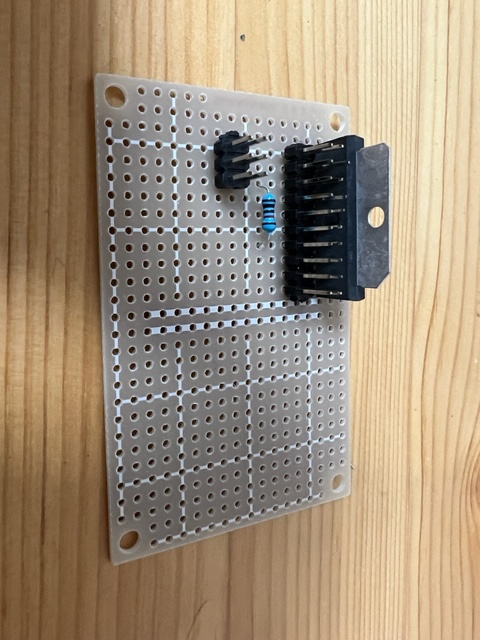
完成!
と思ったのですが。。
結構、重要なことを忘れていました。
サーボモータと黄色の線(制御線)に1kΩを抵抗を噛ませて、回路を保護することを忘れていました。
これをしないと最悪、サーボモータが壊れるらしいです。
なので、1kΩの抵抗を噛ませた
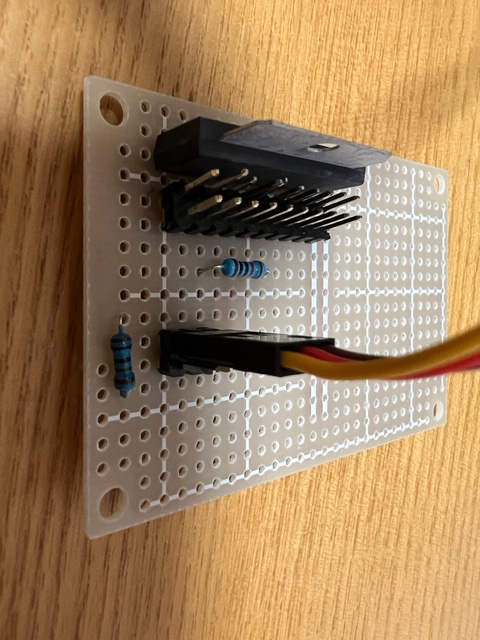
今度こそ、完成です。
次回はサーボモータのプログラミングを書いて、動かしてみます。